���әC���˺��p��ۙ���c
�l��r�g��2019-12-02
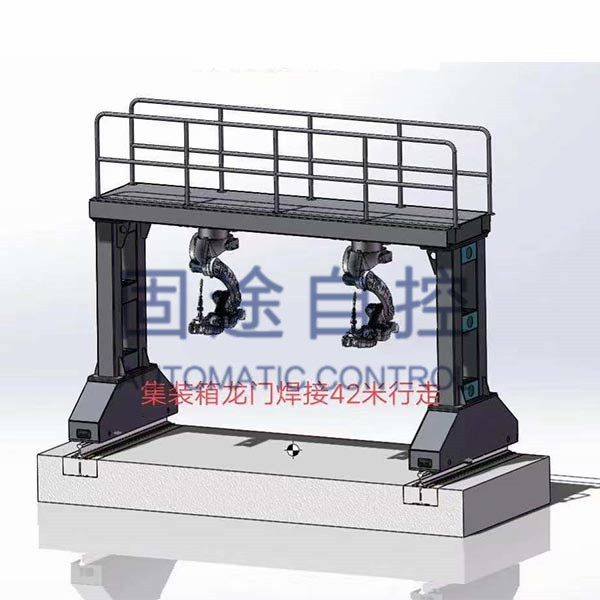
���әC�������ڹ��������ϼ��M꠵��`�����һ���Բ��ߣ����ӳ��Fȱ�ݡ�늻����е�ԭ�����ν�B�£�
1��늻�������������
늻����������䪚�صă��ݣ��ٙz�y�c���Ǻ����c�������ڂ��������еĆ��}������ȫ���r�Ă�������������늻�������������������Բ��ܺ��z��������늻�ƫ�Ƶ�Ӱ푡��۲��H���Ը�ۙ���У����C���Ӆ����ķ���������߀���Ը��ƺ��p�ij���Ч�����ܿ��⡢늴š���ĸɔ_��ʹ�É����L��
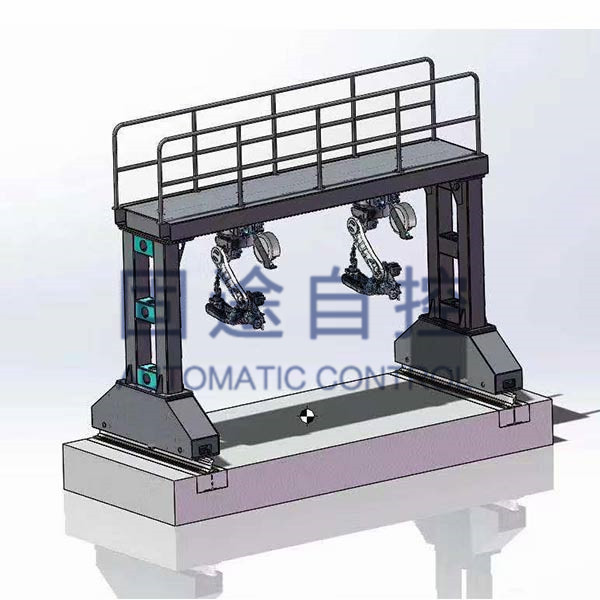
2��늻����еĹ���ԭ��
늻����������ú����^���еĺ��������늻�늉���׃�����@��늻������Ƿ�ƫ�x���p�����Դ����������Ϣ�����r�ԏ�����ۙЧ���á��ڈD1��ʾV�κ��p�У�������ͨ�^�[�ӵ�늻��y�������ں��p��λ�ã���ԭ�t�Ǻ�������\���ں��p�����ģ����Ҍ��ں��p�ĸ������ִ_���ĸ߶ȡ�������ڹ����������`��ں����^����·���l��ƫ�x��ʹ���z�ں��p��߅�ĸ����L��һ�ӣ������H�ĺ�������c�O���������ͬ�������LԽ�̣����H���Խ��;�����LԽ�L�����H���ԽС�������@��ԭ��������������̖�����r�ط������C���˿���ϵ�y��ʹ�C��������Ѹ�پ��_�ķ��������C�����ں����^���е��\��܉�E�M�Ќ��r���������܌��F���p�ľ��_�ٶ�λ��Ҳ�����f������̵�܉�E���������H���p܉�E�Ԅ����������C܉�E���ľ�ʼ�K���¿����ġ��Ķ����C���õĺ��p���͡�
����
���P��
- ���әC���˵ĽM�ɲ���
- �C���˶Ѷ�C����Щ���c
- �a��C���˵�Ч��
- ���әC��������܇�ИI����