�a��C���˵���Ҫ���
�l��r�g��2023-02-04
�����Cе�Y���IJ�ͬ���a��C���������������N��ʽ���ѿ���ʽ�����D�P��ʽ�����T���ؼܡ�
1���ѿ���ʽ�a��C���ˣ���Ҫ���IJ��ֽM�ɣ�������X��ۡ�Y��ۺ�ץ�֡����Ă����ɶȣ����������Ƅ��P����һ�����D�P������Ɍ����ϵĴa�⡣�@�N��ʽ�Ĵa��C���캆�Σ��C�w�����^�����ɰ������^���m�����^�����ϵĴa�⡣
2�����D�P��ʽ�C���ˣ��a��C�@�C�����D�������Ă����D�P�������P�������P�������P�������P�����@�N��ʽ�Ĵa��C��ͨ�^ʾ�̵ķ�ʽ�M�о��̵ģ��������T�ֳ�ʾ�̺У����ƙC���˰�Ҏ���Ą����M���\�ӣ������\���^�̱�惦�ڴ惦���У��Ժ������\�ӕr�����٬F�@һ�\���^�̡��@�N�C���˙C��С������������ͬ�r�M��һ����ׂ��бP��ͬ�r�a�⣬�܉��`��C�ӵČ����M�ж�N�aƷ���a���Ĺ�����
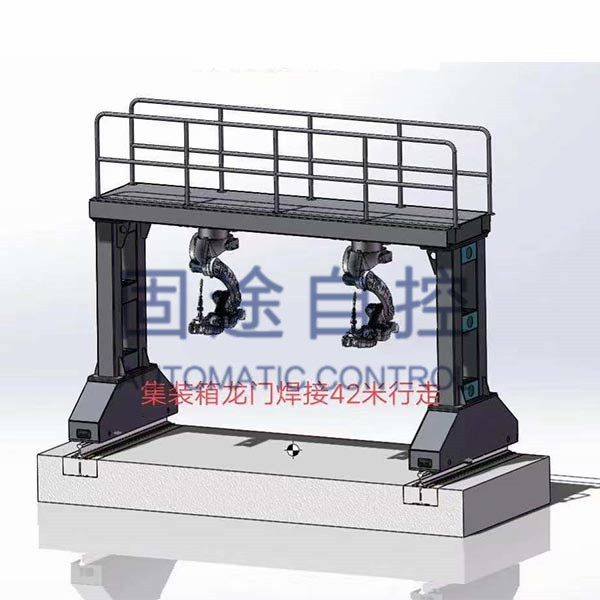
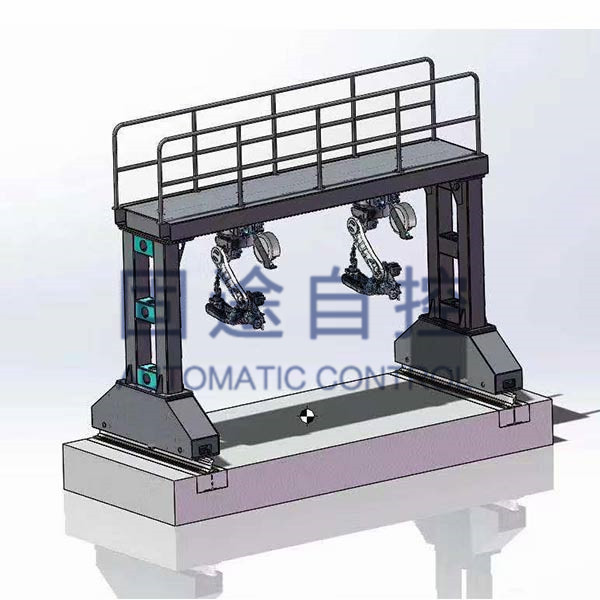
3�����T���ؼܣ����C�����ֱ��b�����T���ؼ��ϷQ�����T�ܴa��C���ˣ��@�N�a��C���˾����^��Ĺ����������܉�ץȡ�^�ص����ϡ�
����
��һ�l���a��C�c�a��C����֮�g�ą^�e
��һ�l�� �a��C���˵����c
���P��
- ���әC���˵ĽM�ɲ���
- �C���˶Ѷ�C����Щ���c
- �a��C���˵�Ч��
- ���әC��������܇�ИI����